Compressive Magnetic Resonance Imaging#
![]()
Magnetic resonance imaging (MRI) is a widely-deployed medical imaging modality for diagnosing and disease monitoring. MRI scanners are prohibitively expensive, and their scanning time directly correlates to the accessibility of MRI scanners to the broader class of patients. Compressed sensing MRI (CS-MRI) substantially accelerates the MRI process through subsampling in the K-space and computationally recovering the MRI image.
Recovering high-quality images from undersampled MRI data is an ill-posed inverse imaging problem with a forward model that can be mathematically expressed as
where \(x \in \mathbb{C}^N\) is the underlying image, the operator \(\mathcal{F}_p : \mathbb{C}^N \rightarrow \mathbb{C}^M\), with \(M < N\), denotes the partially-sampled Fourier transform, and \(\epsilon \sim \mathcal{N} \left(0, \sigma_n I_M \right)\) is the additive white Gaussian noise. The data-fidelity term, for the MRI reconstruction, is \(\mathcal{D} (x) = \frac{1}{2} \| y - \mathcal{F}_p \left(x\right) \|^2\) whose proximal operator is described in [Eksioglu 2016].
With this forward model in hand, \(\nabla\)-Prox facilitates experimenting with different solvers in only a few lines of code, including:
Plug-and-Play Solver
Plug-and-Play Solver with Learned Scheduler
Deep Equilibrium Solver
Unrolled Solver
[1]:
# uncomment the following line to install dprox if your are in online google colab notebook
# !pip install dprox
[2]:
import torch
from torch.utils.data import DataLoader
from dprox import *
from dprox.utils import *
from dprox.contrib.csmri import EvalDataset, load_data
Prepare Data#
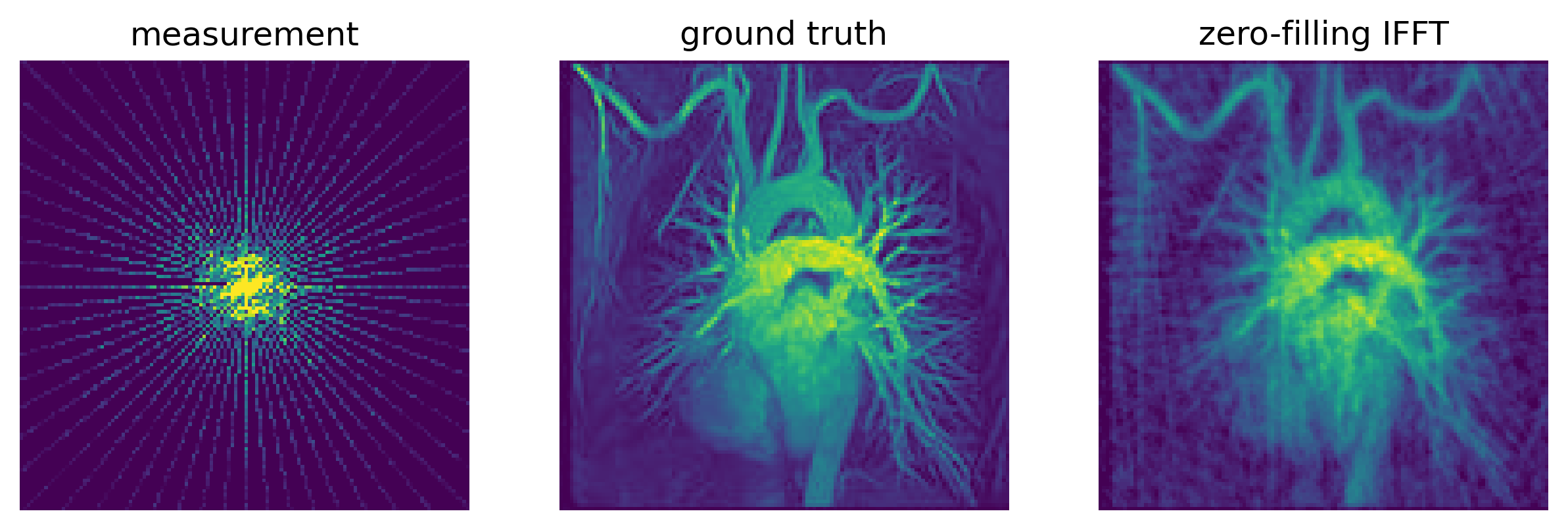
Let us first load some sample data. Since the CS-MRI observation lies in a complex domain, we visualize the magnitude. The initial guess \(x_0\) is obtained by performing inverse FFT on the observation \(y_0\).
[3]:
import numpy as np
def convert_to_tensor(data):
if isinstance(data, dict):
return {key: convert_to_tensor(value) for key, value in data.items()}
elif isinstance(data, np.ndarray):
return torch.tensor(data).unsqueeze(0)
batch = load_data(hf.load_path('examples/csmri/3DMR_Chest.mat'))
batch = convert_to_tensor(batch)
y0 = batch['y0']
target = batch['gt']
mask0 = batch['mask']
x0 = batch['x0'].real
y0_vis = outlier_correct((y0.abs()+1).log(), p=0.5) # for visualization only
imshow(y0_vis, target, x0, gray=False, titles=['measurement', 'ground truth', f'zero-filling IFFT'], off_axis=True)
Plug-and-Play Solver#
In \(\nabla\)-Prox, we can use ADMM to solve CS-MRI with learned plug-and-play denoising priors using the following lines of code:
[4]:
x = Variable()
y = Placeholder()
mask = Placeholder()
data_term = csmri(x, mask, y)
reg_term = deep_prior(x, denoiser='unet')
p = Problem(data_term + reg_term)
y.value = y0
mask.value = mask0
max_iter = 24
rhos, sigmas = log_descent(70, 40, max_iter, sqrt=True)
rhos, _ = log_descent(120, 0.1, max_iter)
p.solve(method='admm', x0=x0, rhos=rhos, lams={reg_term: sigmas}, max_iter=max_iter)
imshow(x.value.real, titles=[f'PnP-UNet Result (PSNR: {psnr(x.value.real, target):.3f})'], off_axis=True)
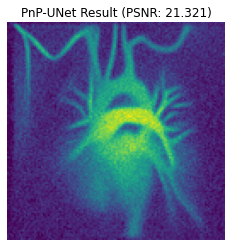
Switch to a Different Deep Prior
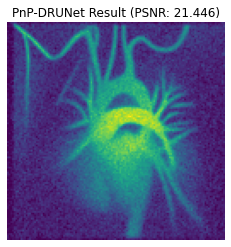
The result is much better than the initial guess. However, the noise still exists. Let us try some advanced denoiser, e.g., DRUNet [Zhang et al. 2021].
The result is slightly better but is still noisy.
[5]:
reg_term = deep_prior(x, denoiser='drunet')
p = Problem(data_term + reg_term)
p.solve(method='admm', x0=x0, rhos=rhos, lams={reg_term: sigmas}, max_iter=max_iter)
imshow(x.value.real, titles=[f'PnP-DRUNet Result (PSNR: {psnr(x.value.real, target):.3f})'], off_axis=True)
Switch to Other Algorithms
Here, we demonstrate that \(\nabla\)-Prox makes writing custom algorithms for specific applications very easy.
In the following, we show a variant of ADMM with a slightly different computation order. Instead of the least-square update, we first perform the proximal update.
[6]:
class CustomADMM(ADMM):
def _iter(self, state, rho, lam):
x, z, u = state
x = [x]
z = z[0]
for i, fn in enumerate(self.psi_fns):
x[i] = fn.prox(z - u[i], lam=lam[fn])
b = [x[i] + u[i] for i in range(len(self.psi_fns))]
z = self.least_square.solve(b, rho)
for i, fn in enumerate(self.psi_fns):
u[i] = u[i] + x[i] - z
return x[0], [z], u
[7]:
psi_fns, omega_fns = CustomADMM.partition(data_term+reg_term)
solver = CustomADMM(psi_fns, omega_fns)
solver.solve(x0=x0, rhos=rhos, lams={reg_term: sigmas}, max_iter=max_iter)
imshow(x.value.real, titles=[f'Custom PnP-ADMM Result (PSNR: {psnr(x.value.real, target):.3f})'], off_axis=True)
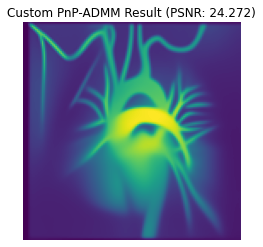
🎉 Oops, the result is much cleaner! However, it can still be smoother.
Plug-and-Play Solver with Learned Scheduler#
As we observe from previous results, a naive plug-and-play approach works. However, it achieves less satisfying results, attributed mainly to the suboptimal hyperparameters we set for ADMM.
We can use the automatically learned parameter scheduler provided by \(\nabla\)-Prox to achieve better results. This can be done by simply wrapping the existing solver in an AutoTuneSolver or using the specialize utility to perform a specialization.
Now, the solve method of the new solver does not require users to provide rhos and lams as the internal scheduler automatically sets the hyperparameters.
[8]:
from dprox.algo.tune import *
from dprox.contrib.csmri import custom_policy_ob_pack_fn
tf_solver = AutoTuneSolver(solver, policy='resnet', custom_policy_ob_pack_fn=custom_policy_ob_pack_fn)
tf_solver.load(hf.load_path('compressive_mri/csmri_tfpnp_unet_custom_admm.pth', repo_type='models'))
pred = tf_solver.solve(x0, aux_state=batch).real
imshow(pred, titles=[f'TFPnP Result (PSNR: {psnr(pred, target):.3f})'], off_axis=True)

The result is more smooth and we can see that more details are recovered. 🌞
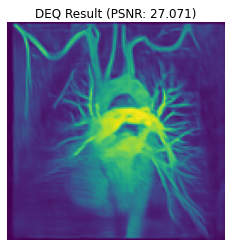
Deep Equilibrium Solver#
Deep Equilibrium (DEQ) solvers approach inverse problems by formulating them as finding the equilibrium point of a certain dynamical system, such as ADMM iterations. Unlike plug-and-play solvers, DEQ solvers conceptually iterate over infinite iterations, making them more robust and effective in some cases.
To use it, \(\nabla\)-Prox provides a class DEQSolver that can be used to wrap an existing solver to build a DEQ Solver. Another approach is to use the specialize utility to perform specialization on the existing solver. Both approaches generate the same DEQ solver.
[9]:
reg_term = deep_prior(x, denoiser='unet')
psi_fns, omega_fns = CustomADMM.partition(data_term+reg_term)
solver = CustomADMM(psi_fns, omega_fns)
deq_solver = DEQSolver(solver, learned_params=True).cuda()
ckpt = hf.load_checkpoint('compressive_mri/csmri_deq_unet.pth')
ckpt['rhos'] = log_descent(1, 1, max_iter, lam=0.5)
deq_solver.load_state_dict(ckpt['solver'], strict=True)
max_iter = 1
_, sigmas = log_descent(130, 130, max_iter)
pred = deq_solver.solve(x0=x0.cuda(), rhos=rhos, lams={reg_term: sigmas}, max_iter=max_iter).real
imshow(pred, titles=[f'DEQ Result (PSNR: {psnr(pred, target):.3f})'], off_axis=True)
/media/exthdd/laizeqiang/lzq/projects/hyper-pnp/submit/Delta-Prox/dprox/algo/specialization/deq/utils/solvers.py:200: UserWarning: Casting complex values to real discards the imaginary part (Triggered internally at /opt/conda/conda-bld/pytorch_1646755953518/work/aten/src/ATen/native/Copy.cpp:239.)
X[:,0], F[:,0] = x0.reshape(bsz, -1), f(x0).reshape(bsz, -1)
Unrolled Solver#
Finally, let us try to specialize the solver by fine-tuning the deep prior to the task of CS-MRI. This is usually helpful because the deep prior is typically an off-the-shelf image denoiser without knowledge about CSMRI.
To do so, \(\nabla\)-Prox provides support for unrolling the solver iterations for fine-tuning. The training can be achieved by calling the train_unroll method. Here, we load the pretrained checkpoint and visualize the obtained results.
[11]:
reg_term = deep_prior(x, denoiser='unet')
psi_fns, omega_fns = CustomADMM.partition(data_term+reg_term)
solver = CustomADMM(psi_fns, omega_fns)
unrolled_solver = UnrolledSolver(solver, max_iter=10, share=True, learned_params=True).cuda()
unrolled_solver.load_state_dict(hf.load_checkpoint('compressive_mri/csmri_unroll_unet_custom_admm.pth'))
pred = unrolled_solver.solve(x0=x0).real
imshow(pred, titles=[f'Unrolled-ADMM Result (PSNR: {psnr(pred, target):.3f})'], off_axis=True)
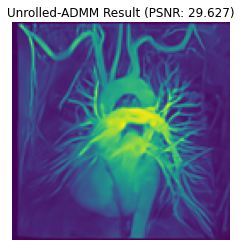
🧐 oops! Now we get a result that achieve the similar results as rl solver and outperforms all other ones by a large margin on PSNR.
So far, we have experimented with six different methods for solving this sample problem. The methods we tried include,
# |
Method |
PSNR |
|---|---|---|
1 |
Plug-and-play with UNet deep prior |
21.32 |
2 |
Plug-and-play with DRUNet deep prior |
21.45 |
3 |
Plug-and-play with custom ADMM |
24.27 |
4 |
Plug-and-play with learned scheduler |
29.89 |
5 |
Deep equilibrium solver |
27.07 |
6 |
Unrolled solver |
29.45 |
While we obtained decent results after six attempts, note that more attempts might be required for other problems. Implementing and experimenting with all these methods is a challenging task, and it often requires domain expertise in proximal optimization and deep learning, which is often prone to errors and time-consuming.
With \(\nabla\)-Prox, users can specify optimization objective functions of unknowns concisely at a high level and intelligently compile the problem into compute and memory-efficient differentiable solvers, making fast prototyping of different methods much more effortless and accessible.
Reference#
[Eksioglu 2016] Ender M Eksioglu. 2016. Decoupled algorithm for MRI reconstruction using nonlocal block matching model: BM3D-MRI. Journal of Mathematical Imaging and Vision 56, 3 (2016), 430–440.
[Zhang et al. 2021] Kai Zhang, Yawei Li, Wangmeng Zuo, Lei Zhang, Luc Van Gool, and Radu Timofte. 2021. Plug-and-play image restoration with deep denoiser prior. IEEE Transactions on Pattern Analysis and Machine Intelligence (2021).